About Me
Saurabh Bagh
Senior Software Engineer - Engineering Manager - Founder
Berlin, Germany
Senior Software Engineer with 8+ years of experience building scalable backend systems, RESTful APIs, and distributed services using C#, .NET, and Python. Strong background in microservices architecture, cloud platforms (Azure/AWS), and data-driven systems. Proven track record of improving performance, reliability, and security of production systems. Passionate about building high-impact platforms that enhance matching efficiency, visibility, and user experience.
Programming Skills
Currently Working On
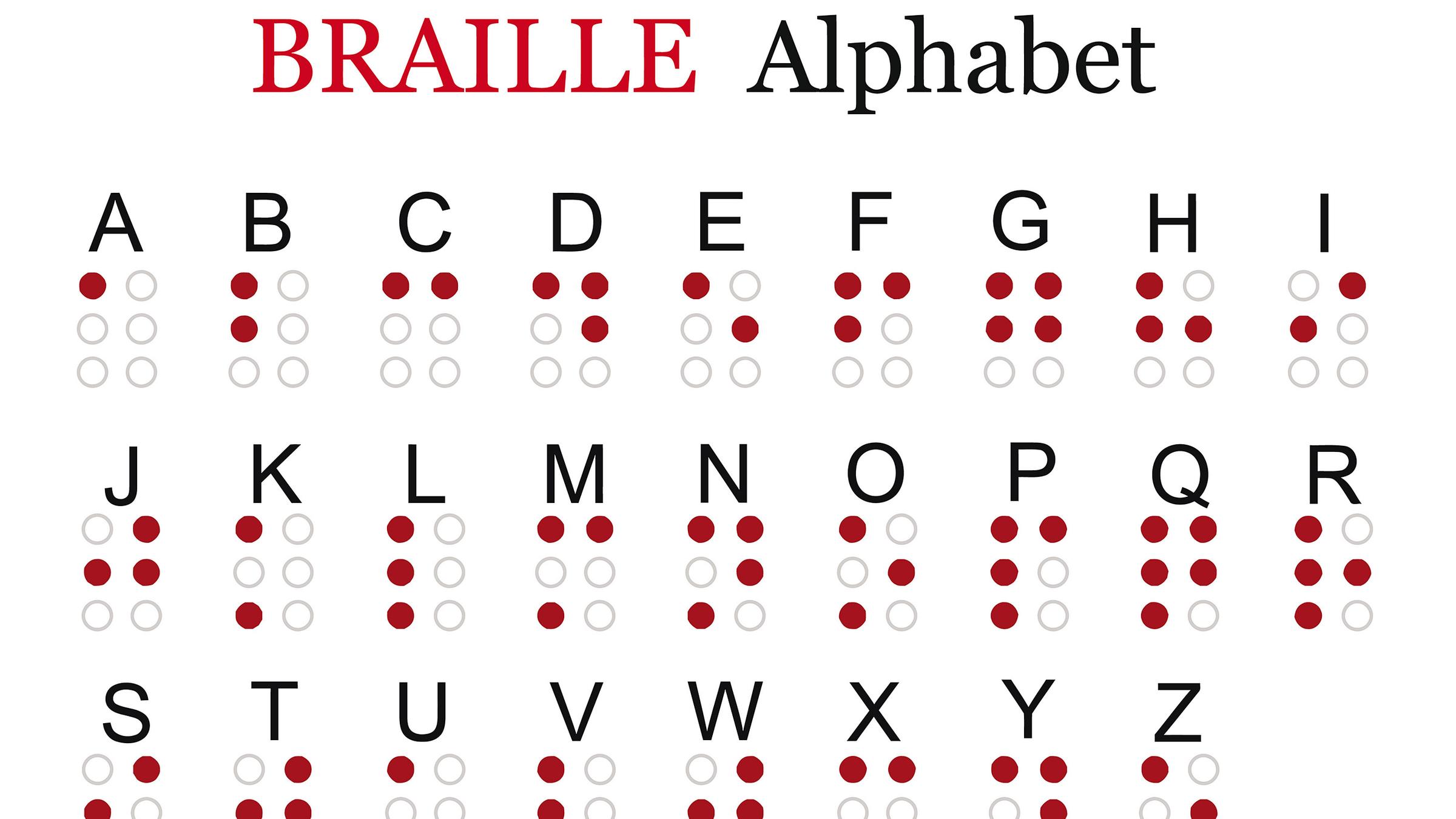
Braille Project
Designing braille patterns on the Ultrahaptics
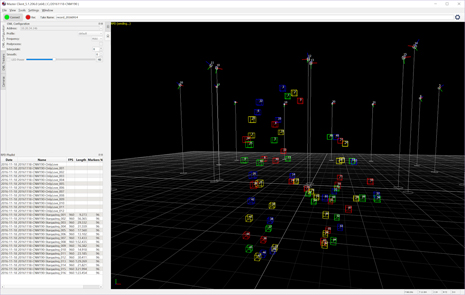
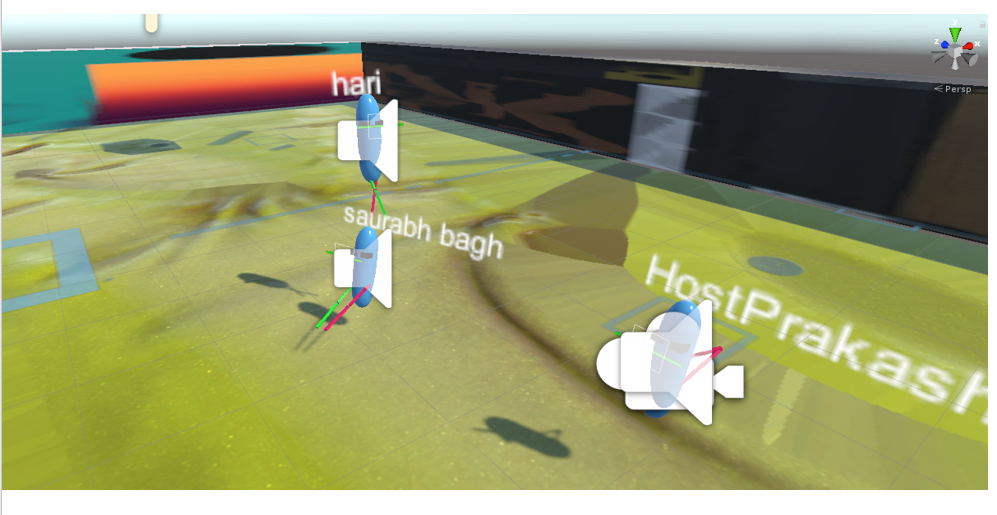
Phasespace Motion Capture
Integration with an Avatar in Unity
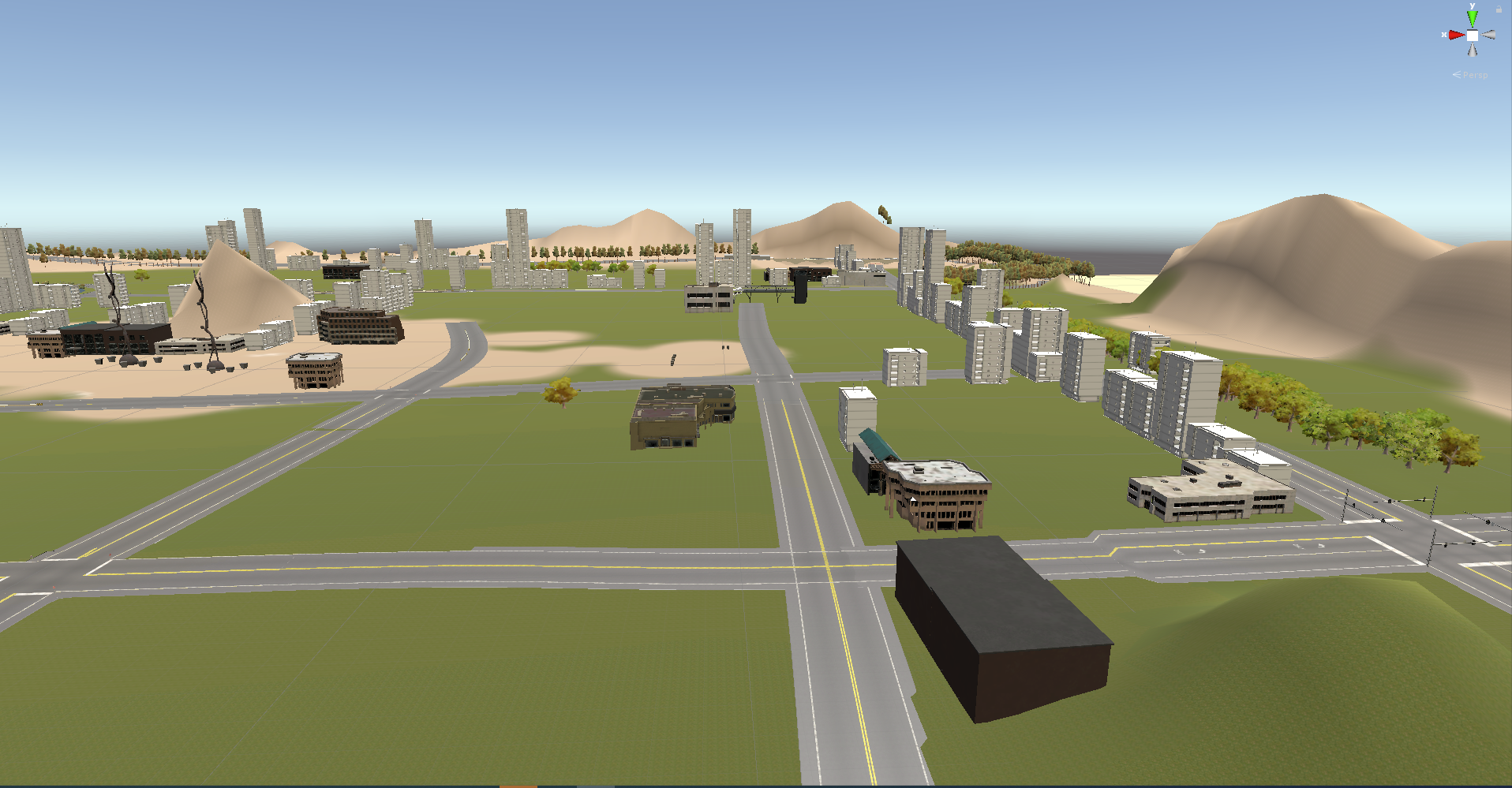
Driving Simulator
Integration with Pupil Labs eyetracking with Motion platform